Dans ce tutoriel nous allons voir comment utiliser un module de détection nous utiliserons pour notre exemple un module HC-SR04 .
Celui-ci va nous permettre de mesurer une distance et d’allumer une LED lorsque nous l’aurons décidé.
Niveau de difficulté : Débutant
Matériel nécessaire :
- Carte Arduino *1 ( Arduino nano dans mon cas ) http://amzn.to/2a3LmCQ
- Module de détection ultrason ( HC-SR04 ) http://amzn.to/2hf0rUw
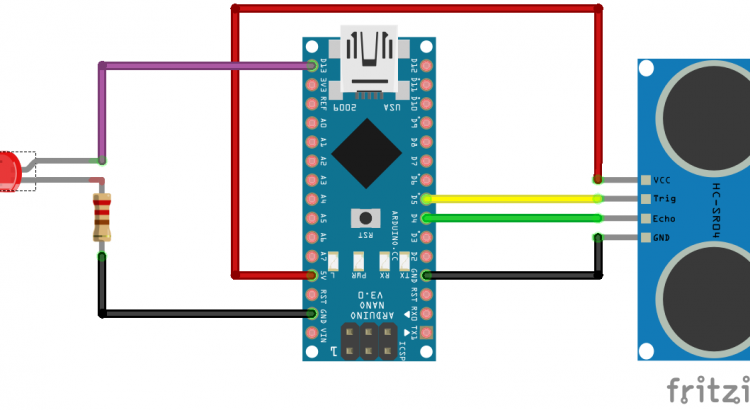
Câblage module HC-SR04 :
Nous allons donc raccorder comme ceci:
Les broches TRIG et ECHO sont définies dans notre programme celles-ci peuvent évidemment être modifiées à souhait.
Arduino → HC-SR04
- 5V sur VCC
- GND sur gnd
- D5 sur TRIG
- D4 sur ECHO
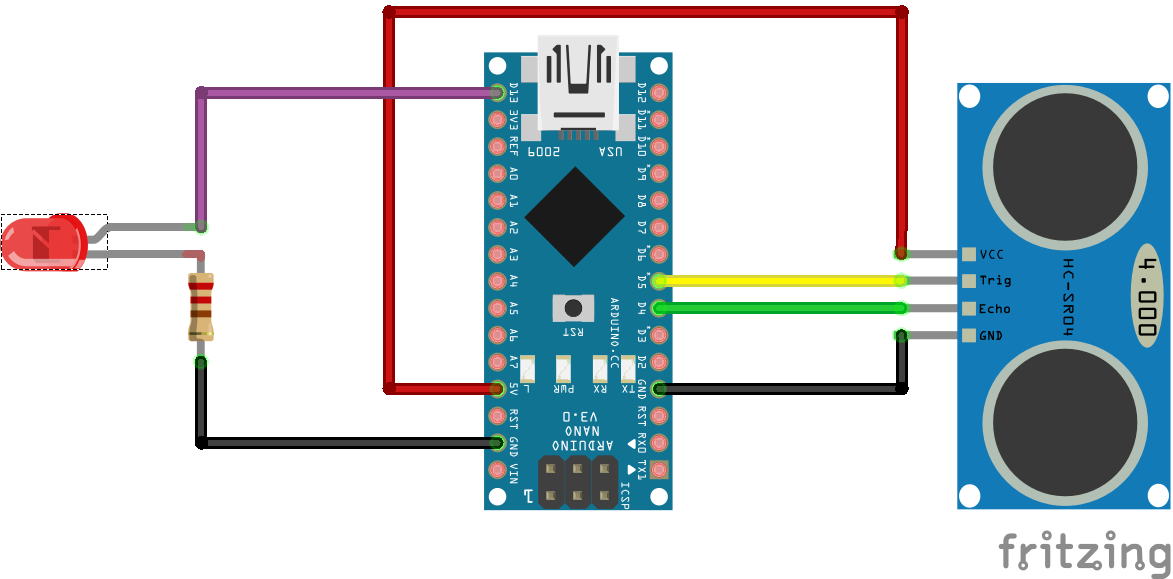
Câblage de notre LED :
Une fois que notre module sera raccordé il nous faudra bien évidemment mettre en place notre témoin lumineux si nous souhaitons l’utiliser ainsi il serait tout à fait possible de contrôler un relais par exemple.
Pour ce faire nous allons donc procéder ainsi :
Arduino → LED
- D13 sur LED
La broche 13 est ici utilisée pour la led par facilité en effet celle présente sur les carte Arduino (« L ») fonctionne avec cette broche ainsi il n’est donc même pas nécessaire d’en raccorder une à la broche 13 afin de voir le résultat.
Notre montage devrait donc ressembler à ça :
Le programme :
Maintenant que nous disposons du matériel nécessaire et que celui-ci est convenablement raccordé, il va falloir passer à la programmation de notre Arduino !
Transfert :
Pour le transfert du code sur l’Arduino, la procédure est relativement simple mais si vous ne l’avez jamais fait, je vous invite à jeter un coup d’œil par ici :
https://www.memorandum.ovh/utiliser-le-logiciel-arduino/
Toutes les informations concernant le réglage ainsi que les différents paramètres pour notre module se trouveront dans le code.
[pastacode lang= »c » path_id= »36efb34fe467f8068d9d8a597d501721″ file= » » highlight= » » lines= » » provider= »gist »/]
Paramètres et réglages :
Maintenant que notre montage est terminé et que le programme a bien été envoyé à l’Arduino nous allons pouvoir détailler un peu tout ça.
Moniteur série :
La procédure est la suivante dans le programme Arduino, cliquer sur Outils puis Moniteur série.
Cette manipulation peut aussi être faite via les touches du clavier Ctrl + Maj +M.
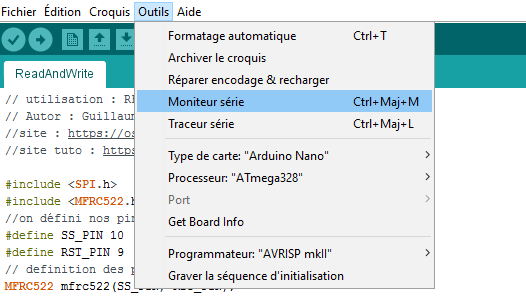
Il faudra évidemment que notre Arduino soit relié au PC si nous voulons que cela fonctionne, nous devrions ainsi avoir quelque chose ressemblant à l’image ci-dessous.

Nous pouvons voir ici que nous affichons deux valeurs la distance et la durée. La durée représente le temps de parcours de notre signal entre le moment ou celui-ci est émis par « trigPin » et celui où il est reçu par « echoPin ». Nous utilisons une formule dans notre programme qui nous permet de transformer tout ça en distance (vitesse du son théorique).
Formule actuelle : distance = duree*340/(2*10000) nous obtenons ainsi une distance en cm.
Formule millimètre distance = duree*340/(2*1000) notre distance sera donc affichée en millimètre et plus en cm, si vous faites ce choix n’oubliez pas de modifier la ligne Serial.print( » cm ») afin que vos valeurs soient cohérentes.
Modification du programme :
Dans le programme le seul paramètre nécessitant des modifications se trouve à la ligne 11 « mindist » ce paramètre va nous permettre de définir la distance à partir de laquelle nous souhaitons que notre led s’allume. Dans notre exemple si la distance est inférieure à 5 centimètres la led sera allumée.
Dans le cas contraire nous l’éteindrons tout simplement.
J’espère que cet article vous aura plu, n’hésitez pas à le partager.
Bonjour. Merci pour le projet et pour toutes les astuces. Je me suis inspiré par votre projet pour faire un min sèche-mains à ultrason. Ci-dessous le lien du projet pour les personnes intéressées: https://www.electronique-mixte.fr/projet-electronique-17-seche-mains-ultrason-avec-arduino/
Content que cela puisse servir, je prépare en ce moment un article similaire mais j’utiliserais un petit lidar (VL53L0X) beaucoup plus petit et offrant en principe un rafraîchissement des données plus rapide. Je ne l’invente pas la lumière est plus rapide que le son.
Merci pour ce tuto,
Pour ceux qui veulent détecter des distances proches, il est préférable d’utiliser le timeOut de la fonction pulseIn:
pulseIn(echoPin,HIGH, TimeOut) et calculer TimeOut en fonction de la distance
La fonction pulseIn est une fonction « bloquante », qui attend le echo et il peut être long parfois..
Re Bonjour, voici un autre essai , la compil est bonne mais le capteur en pin 7 et 9 fonctionne pas :
[pastacode lang= »markup » manual= »%2F*%20sketch%20Arduino%20utilisation%20d’un%20module%20hc-sr04%0AAutheur%20%3A%20Guillaume%20FLOCH%0Asite%20web%20%3A%20www.osdclic.fr%0Atuto%20%3A%20www.memorandum.ovh%0Amembre%20de%20%3A%20www.goldorhack.org%0A*%2F%0A%0A%23define%20trigPin%205%20%20%20%20%20%20%2F%2FTrig%20%0A%23define%20echoPin%204%20%20%20%20%20%20%2F%2FEcho%20%0A%23define%20trigPinV%207%20%20%20%20%20%2F%2FTrig%202eme%20%0A%23define%20echoPinV%209%20%20%20%20%20%20%2F%2FEcho%202eme%0A%0A%23define%20avertisseur%2013%20%2F%2FLed%0Aint%20mindist%20%3D%20100%3B%20%2F%2FOn%20indique%20la%20distance%20en%20dessous%20de%20laquelle%20nous%20souhaitons%20voir%20la%20led%20s’allumer%0A%2F%2Fint%20mindistV%20%3D%20100%3B%20%2F%2FOn%20indique%20la%20distance%20en%20dessous%20de%20laquelle%20nous%20souhaitons%20voir%20la%20led%20s’allumer%0Avoid%20setup()%20%7B%0A%2F%2F%20%20Serial.begin%20(9600)%3B%20%20%0A%20%20pinMode(trigPin%2C%20OUTPUT)%3B%20%20%2F%2FOn%20d%C3%A9fini%20Trig%20comme%20une%20sortie%0A%20%20pinMode(echoPin%2C%20INPUT)%3B%20%20%20%2F%2FOn%20d%C3%A9fini%20Echo%20comme%20une%20entr%C3%A9e%0A%20%20pinMode(trigPinV%2C%20OUTPUT)%3B%20%20%2F%2FOn%20d%C3%A9fini%20TrigV%20comme%20une%20sortie%0A%20%20pinMode(echoPinV%2C%20INPUT)%3B%20%20%20%2F%2FOn%20d%C3%A9fini%20EchoV%20comme%20une%20entr%C3%A9e%0A%20%20%0A%20%20pinMode(avertisseur%2C%20OUTPUT)%3B%20%2F%2FOn%20d%C3%A9fini%20la%20led%20comme%20une%20sortie%0A%7D%0A%0Avoid%20loop()%20%7B%0A%20%20long%20duree%2C%20distance%3B%0A%20%20digitalWrite(trigPin%2C%20LOW)%3B%20%20%0A%20%20delayMicroseconds(2)%3B%20%0A%20%20digitalWrite(trigPin%2C%20HIGH)%3B%0A%20%20delayMicroseconds(10)%3B%20%2F%2FTrig%20envois%20pendant%2010ms%20%0A%20%20digitalWrite(trigPin%2C%20LOW)%3B%0A%20%20long%20dureV%2C%20distanceV%3B%0A%20%20digitalWrite(trigPinV%2C%20LOW)%3B%20%20%0A%20%20delayMicroseconds(2)%3B%20%0A%20%20digitalWrite(trigPinV%2C%20HIGH)%3B%0A%20%20delayMicroseconds(10)%3B%20%2F%2FTrig%20envois%20pendant%2010ms%20%0A%20%20digitalWrite(trigPinV%2C%20LOW)%3B%0A%20%20%2F%2F%20On%20calcul%20le%20temps%20pour%20l’aller%20retour%20du%20signal%0A%20%20duree%20%3D%20pulseIn(echoPin%2C%20HIGH)%3B%0A%20%20distance%20%3D%20duree*340%2F(2*10000)%3B%20%20%0A%20%20dureV%20%3D%20pulseIn(echoPinV%2C%20HIGH)%3B%0A%20%20distanceV%20%3D%20dureV*340%2F(2*10000)%3B%20%20%20%0Aif%20(distance%20%3C%20mindist)%20%7B%20%20%2F%2F%20On%20allume%20la%20led%20si%20on%20est%20moins%20loin%20que%20%22mindist%22%2C%20mindist%20%C3%A9tant%20d%C3%A9fini%20en%20d%C3%A9but%20de%20programme%0A%20%20%20%20%20digitalWrite(avertisseur%2CLOW)%3B%0A%20%20%20%20%20delay%20(30*1000)%3B%0A%20%20%20%20%20(distanceV%20%3C%20mindist)%3B%20%20%20%2F%2F%20On%20allume%20la%20led%20si%20on%20est%20moins%20loin%20que%20%22mindistV%22%2C%20mindist%20%C3%A9tant%20d%C3%A9fini%20en%20d%C3%A9but%20de%20programme%0A%20%20%20%20%20digitalWrite(avertisseur%2CLOW)%3B%0A%20%20%20%20%20delay%20(30*1000)%3B%0A%7D%0Aelse%20%7B%20%20%20%2F%2Fsinon%20on%20%C3%A9teind%20la%20led%0A%20%20%20%20digitalWrite(avertisseur%2CHIGH)%3B%0A%0A%0A%20%20%20%20%0A%7D%0Adelay%20(100)%3B%20%0A%0A%7D%0A%20%20%2F%2FPour%20le%20moniteur%20s%C3%A9rie%0A%2F%2F%20%20if%20(%20distance%20%3C%3D%200)%7B%20%20%0A%2F%2F%20%20%20%20Serial.println(%22Hors%20de%20portee%22)%3B%0A%2F%2F%20%7D%0A%2F%2F%20%20else%20%7B%0A%2F%2F%20%20%20%20Serial.print(distance)%3B%0A%2F%2F%20%20%20%20%20%20Serial.print(distanceV)%3B%0A%2F%2F%20%20%20%20Serial.print(%22%20cm%20%22)%3B%0A%2F%2F%20%20%20%20Serial.print(duree)%3B%0A%2F%2F%20%20%20%20Serial.println(%22%20ms%22)%3B%0A%2F%2F%20%20%7D%0A%2F%2F%20%20delay(100)%3B%0A%2F%2F%7D » message= »2 capteur ultrasonic v2″ highlight= » » provider= »manual »/]
[pastacode lang= »markup » manual= »%2F*%20sketch%20Arduino%20utilisation%20d’un%20module%20hc-sr04%0AAutheur%20%3A%20Guillaume%20FLOCH%0Asite%20web%20%3A%20www.osdclic.fr%0Atuto%20%3A%20www.memorandum.ovh%0Amembre%20de%20%3A%20www.goldorhack.org%0A*%2F%0A%0A%23define%20trigPin%205%20%20%20%20%20%20%2F%2FTrig%20%0A%23define%20echoPin%204%20%20%20%20%20%20%2F%2FEcho%20%0A%23define%20trigPinV%207%20%20%20%20%20%2F%2FTrig%202eme%20%0A%23define%20echoPinV%209%20%20%20%20%20%20%2F%2FEcho%202eme%0A%0A%23define%20avertisseur%2013%20%2F%2FLed%0Aint%20mindist%20%3D%20100%3B%20%2F%2FOn%20indique%20la%20distance%20en%20dessous%20de%20laquelle%20nous%20souhaitons%20voir%20la%20led%20s’allumer%0Aint%20mindistV%20%3D%20100%3B%20%2F%2FOn%20indique%20la%20distance%20en%20dessous%20de%20laquelle%20nous%20souhaitons%20voir%20la%20led%20s’allumer%0Avoid%20setup()%20%7B%0A%2F%2F%20%20Serial.begin%20(9600)%3B%20%20%0A%20%20pinMode(trigPin%2C%20OUTPUT)%3B%20%20%2F%2FOn%20d%C3%A9fini%20Trig%20comme%20une%20sortie%0A%20%20pinMode(echoPin%2C%20INPUT)%3B%20%20%20%2F%2FOn%20d%C3%A9fini%20Echo%20comme%20une%20entr%C3%A9e%0A%20%20pinMode(trigPinV%2C%20OUTPUT)%3B%20%20%2F%2FOn%20d%C3%A9fini%20TrigV%20comme%20une%20sortie%0A%20%20pinMode(echoPinV%2C%20INPUT)%3B%20%20%20%2F%2FOn%20d%C3%A9fini%20EchoV%20comme%20une%20entr%C3%A9e%0A%20%20%0A%20%20pinMode(avertisseur%2C%20OUTPUT)%3B%20%2F%2FOn%20d%C3%A9fini%20la%20led%20comme%20une%20sortie%0A%7D%0A%0Avoid%20loop()%20%7B%0A%20%20long%20duree%2C%20distance%3B%0A%20%20digitalWrite(trigPin%2C%20LOW)%3B%20%20%0A%20%20delayMicroseconds(2)%3B%20%0A%20%20digitalWrite(trigPin%2C%20HIGH)%3B%0A%20%20delayMicroseconds(10)%3B%20%2F%2FTrig%20envois%20pendant%2010ms%20%0A%20%20digitalWrite(trigPin%2C%20LOW)%3B%0A%20%20%0A%20%20%2F%2F%20On%20calcul%20le%20temps%20pour%20l’aller%20retour%20du%20signal%0A%20%20duree%20%3D%20pulseIn(echoPin%2C%20HIGH)%3B%0A%20%20distance%20%3D%20duree*340%2F(2*10000)%3B%20%20%0A%20%20%20%0Aif%20(distance%20%3C%20mindist)%20%7B%20%20%2F%2F%20On%20allume%20la%20led%20si%20on%20est%20moins%20loin%20que%20%22mindist%22%2C%20mindist%20%C3%A9tant%20d%C3%A9fini%20en%20d%C3%A9but%20de%20programme%0A%20%20%20%20%20digitalWrite(avertisseur%2CLOW)%3B%0A%20%20%20%20%20delay%20(30*1000)%3B%0A%20%20%20%20%20%0A%7D%0Aelse%20%7B%20%20%20%2F%2Fsinon%20on%20%C3%A9teind%20la%20led%0A%20%20%20%20digitalWrite(avertisseur%2CHIGH)%3B%0A%0A%0A%0A%0A%0A%20%20long%20dureV%2C%20distanceV%3B%0A%20%20digitalWrite(trigPinV%2C%20LOW)%3B%20%20%0A%20%20delayMicroseconds(2)%3B%20%0A%20%20digitalWrite(trigPinV%2C%20HIGH)%3B%0A%20%20delayMicroseconds(10)%3B%20%2F%2FTrig%20envois%20pendant%2010ms%20%0A%20%20digitalWrite(trigPinV%2C%20LOW)%3B%0A%20%20%0A%20%20%2F%2F%20On%20calcul%20le%20temps%20pour%20l’aller%20retour%20du%20signal%0A%20%20dureV%20%3D%20pulseIn(echoPinV%2C%20HIGH)%3B%0A%20%20distanceV%20%3D%20dureV*340%2F(2*10000)%3B%20%20%0A%20%20dureV%20%3D%20pulseIn(echoPinV%2C%20HIGH)%3B%0A%20%20distanceV%20%3D%20dureV*340%2F(2*10000)%3B%20%20%20%0Aif%20(distanceV%20%3C%20mindistV)%20%7B%20%20%2F%2F%20On%20allume%20la%20led%20si%20on%20est%20moins%20loin%20que%20%22mindist%22%2C%20mindist%20%C3%A9tant%20d%C3%A9fini%20en%20d%C3%A9but%20de%20programme%0A%20%20%20%20%20digitalWrite(avertisseur%2CLOW)%3B%0A%20%20%20%20%20delay%20(30*1000)%3B%0A%20%20%20%20%20(distanceV%20%3C%20mindistV)%3B%20%20%20%2F%2F%20On%20allume%20la%20led%20si%20on%20est%20moins%20loin%20que%20%22mindistV%22%2C%20mindist%20%C3%A9tant%20d%C3%A9fini%20en%20d%C3%A9but%20de%20programme%0A%20%20%20%20%20digitalWrite(avertisseur%2CLOW)%3B%0A%20%20%20%20%20delay%20(30*1000)%3B%0A%7D%0Aelse%20if%20%7B%20%20%20%2F%2Fsinon%20on%20%C3%A9teind%20la%20led%0A%20%20%20%20digitalWrite(avertisseur%2CHIGH)%3B%0A%0A%20%20%20%0A%7D%0Adelay%20(100)%3B%20%0A%0A%7D%0A%7D%0A%20%20%2F%2FPour%20le%20moniteur%20s%C3%A9rie%0A%2F%2F%20%20if%20(%20distance%20%3C%3D%200)%7B%20%20%0A%2F%2F%20%20%20%20Serial.println(%22Hors%20de%20portee%22)%3B%0A%2F%2F%20%7D%0A%2F%2F%20%20else%20%7B%0A%2F%2F%20%20%20%20Serial.print(distance)%3B%0A%2F%2F%20%20%20%20%20%20Serial.print(distanceV)%3B%0A%2F%2F%20%20%20%20Serial.print(%22%20cm%20%22)%3B%0A%2F%2F%20%20%20%20Serial.print(duree)%3B%0A%2F%2F%20%20%20%20Serial.println(%22%20ms%22)%3B%0A%2F%2F%20%20%7D%0A%2F%2F%20%20delay(100)%3B%0A%2F%2F%7D » message= »2 capteur ultrasonic » highlight= » » provider= »manual »/]
Bonjour,
 
Merci pour ce tutoriel !
J’ai branché un relais et cela tourne très bien.
J’essais de brancher 2 capteur ultrasonic qui commanderai le pin 13.
 
voici le code : (cela ne marche pas),
[pastacode lang= »c » manual= »%2F*%20sketch%20Arduino%20utilisation%20d’un%20module%20hc-sr04%0AAutheur%20%3A%20Guillaume%20FLOCH%0Asite%20web%20%3A%20www.osdclic.fr%0Atuto%20%3A%20www.memorandum.ovh%0Amembre%20de%20%3A%20www.goldorhack.org%0A*%2F%0A%0A%23define%20trigPin%205%20%20%20%20%20%20%2F%2FTrig%20%0A%23define%20echoPin%204%20%20%20%20%20%20%2F%2FEcho%20%0A%23define%20trigPinV%207%20%20%20%20%20%2F%2FTrig%202eme%20%0A%23define%20echoPinV%209%20%20%20%20%20%20%2F%2FEcho%202eme%0A%0A%23define%20avertisseur%2013%20%2F%2FLed%0Aint%20mindist%20%3D%20100%3B%20%2F%2FOn%20indique%20la%20distance%20en%20dessous%20de%20laquelle%20nous%20souhaitons%20voir%20la%20led%20s’allumer%0Aint%20mindistV%20%3D%20100%3B%20%2F%2FOn%20indique%20la%20distance%20en%20dessous%20de%20laquelle%20nous%20souhaitons%20voir%20la%20led%20s’allumer%0Avoid%20setup()%20%7B%0A%2F%2F%20%20Serial.begin%20(9600)%3B%20%20%0A%20%20pinMode(trigPin%2C%20OUTPUT)%3B%20%20%2F%2FOn%20d%C3%A9fini%20Trig%20comme%20une%20sortie%0A%20%20pinMode(echoPin%2C%20INPUT)%3B%20%20%20%2F%2FOn%20d%C3%A9fini%20Echo%20comme%20une%20entr%C3%A9e%0A%20%20pinMode(trigPinV%2C%20OUTPUT)%3B%20%20%2F%2FOn%20d%C3%A9fini%20TrigV%20comme%20une%20sortie%0A%20%20pinMode(echoPinV%2C%20INPUT)%3B%20%20%20%2F%2FOn%20d%C3%A9fini%20EchoV%20comme%20une%20entr%C3%A9e%0A%20%20%0A%20%20pinMode(avertisseur%2C%20OUTPUT)%3B%20%2F%2FOn%20d%C3%A9fini%20la%20led%20comme%20une%20sortie%0A%7D%0A%0Avoid%20loop()%20%7B%0A%20%20long%20duree%2C%20distance%3B%0A%20%20digitalWrite(trigPin%2C%20LOW)%3B%20%20%0A%20%20delayMicroseconds(2)%3B%20%0A%20%20digitalWrite(trigPin%2C%20HIGH)%3B%0A%20%20delayMicroseconds(10)%3B%20%2F%2FTrig%20envois%20pendant%2010ms%20%0A%20%20digitalWrite(trigPin%2C%20LOW)%3B%0A%20%20%0A%20%20%2F%2F%20On%20calcul%20le%20temps%20pour%20l’aller%20retour%20du%20signal%0A%20%20duree%20%3D%20pulseIn(echoPin%2C%20HIGH)%3B%0A%20%20distance%20%3D%20duree*340%2F(2*10000)%3B%20%20%0A%20%20%20%0Aif%20(distance%20%3C%20mindist)%20%7B%20%20%2F%2F%20On%20allume%20la%20led%20si%20on%20est%20moins%20loin%20que%20%22mindist%22%2C%20mindist%20%C3%A9tant%20d%C3%A9fini%20en%20d%C3%A9but%20de%20programme%0A%20%20%20%20%20digitalWrite(avertisseur%2CLOW)%3B%0A%20%20%20%20%20delay%20(30*1000)%3B%0A%20%20%20%20%20%0A%7D%0Aelse%20%7B%20%20%20%2F%2Fsinon%20on%20%C3%A9teind%20la%20led%0A%20%20%20%20digitalWrite(avertisseur%2CHIGH)%3B%0A%0A%0A%0A%0A%0A%20%20long%20dureV%2C%20distanceV%3B%0A%20%20digitalWrite(trigPinV%2C%20LOW)%3B%20%20%0A%20%20delayMicroseconds(2)%3B%20%0A%20%20digitalWrite(trigPinV%2C%20HIGH)%3B%0A%20%20delayMicroseconds(10)%3B%20%2F%2FTrig%20envois%20pendant%2010ms%20%0A%20%20digitalWrite(trigPinV%2C%20LOW)%3B%0A%20%20%0A%20%20%2F%2F%20On%20calcul%20le%20temps%20pour%20l’aller%20retour%20du%20signal%0A%20%20dureV%20%3D%20pulseIn(echoPinV%2C%20HIGH)%3B%0A%20%20distanceV%20%3D%20dureV*340%2F(2*10000)%3B%20%20%0A%20%20dureV%20%3D%20pulseIn(echoPinV%2C%20HIGH)%3B%0A%20%20distanceV%20%3D%20dureV*340%2F(2*10000)%3B%20%20%20%0Aif%20(distanceV%20%3C%20mindistV)%20%7B%20%20%2F%2F%20On%20allume%20la%20led%20si%20on%20est%20moins%20loin%20que%20%22mindist%22%2C%20mindist%20%C3%A9tant%20d%C3%A9fini%20en%20d%C3%A9but%20de%20programme%0A%20%20%20%20%20digitalWrite(avertisseur%2CLOW)%3B%0A%20%20%20%20%20delay%20(30*1000)%3B%0A%20%20%20%20%20(distanceV%20%3C%20mindistV)%3B%20%20%20%2F%2F%20On%20allume%20la%20led%20si%20on%20est%20moins%20loin%20que%20%22mindistV%22%2C%20mindist%20%C3%A9tant%20d%C3%A9fini%20en%20d%C3%A9but%20de%20programme%0A%20%20%20%20%20digitalWrite(avertisseur%2CLOW)%3B%0A%20%20%20%20%20delay%20(30*1000)%3B%0A%7D%0Aelse%20if%20%7B%20%20%20%2F%2Fsinon%20on%20%C3%A9teind%20la%20led%0A%20%20%20%20digitalWrite(avertisseur%2CHIGH)%3B%0A%0A%20%20%20%0A%7D%0Adelay%20(100)%3B%20%0A%0A%7D%0A%7D%0A%20%20%2F%2FPour%20le%20moniteur%20s%C3%A9rie%0A%2F%2F%20%20if%20(%20distance%20%3C%3D%200)%7B%20%20%0A%2F%2F%20%20%20%20Serial.println(%22Hors%20de%20portee%22)%3B%0A%2F%2F%20%7D%0A%2F%2F%20%20else%20%7B%0A%2F%2F%20%20%20%20Serial.print(distance)%3B%0A%2F%2F%20%20%20%20%20%20Serial.print(distanceV)%3B%0A%2F%2F%20%20%20%20Serial.print(%22%20cm%20%22)%3B%0A%2F%2F%20%20%20%20Serial.print(duree)%3B%0A%2F%2F%20%20%20%20Serial.println(%22%20ms%22)%3B%0A%2F%2F%20%20%7D%0A%2F%2F%20%20delay(100)%3B%0A%2F%2F%7D » message= »2 capteur ultrasonic » highlight= » » provider= »manual »/]
Bonjour,
C’est génial : merci beaucoup. Peut-on espérer une suite aux tutos Arduino et ses modules ?
Bonjour, oui je fais les tutos au gré de mes montages mais si vous avez des suggestion n’hésitez pas à nous en faire part.
Bonjour,
j’ai apprècié votre tutoriel “Tuto-Arduino Utiliser un module ultrason HC-SR04” et merci une fois de plus.
j’ai une question par apport a mon projet académique, en fait j’aimerai un Balayer un périmètre de 180 degrés et dessiner (envoyer les valeurs sur le port série) du périmètre mesuré. pourriez vous m’aider svp?
merci d’avance
Bonjour, je sais que ce type de projet à déja été réalisé je n’ai pas eu l’occasion de m’y essayer mais il est certain que c’est réalisable. Que recherchez vous comme aide?